Intelligente
¿Qué es la amplificación de la inteligencia?
Máquinas y humanos trabajan sinergias para hacer mejor juntos lo que no pueden hacer solos

¿Qué es la amplificación de la inteligencia? Veamos. Según la Organización de las Naciones Unidas (ONU), en las próximas tres décadas se prevé que la población mundial mayor de 65 años se duplique.
Eso significa que más de 1.500 millones de personas en todo el mundo tendrán 65 años o más en 2050.
Crear robots avanzados de asistencia humana que ayuden a las personas a envejecer
Este envejecimiento de la población tendrá profundos efectos en la sociedad, la fuerza laboral y la economía.
Ante esta situación, Toyota Research Institute (TRI) investiga para buscar opciones con las que abordar este desafío.
Se trata de crear robots avanzados de asistencia humana que ayuden a las personas a envejecer con la suficiente calidad de vida y bienestar. Te lo contamos en conideintelligente.com, el portal de la gente intelligente.

¿Qué es la amplificación de la inteligencia?
La investigación robótica de TRI se guía por el concepto japonés ‘Ikigai’. Es una poderosa idea de que la vida de cada persona debe tener un sentido y propósito.
La investigación de TRI utiliza la AI para mejorar la capacidad humana
El enfoque centrado en el ser humano de TRI invierte la filosofía típica de Inteligencia Artificial (AI). En lugar de reemplazar a los seres humanos, la investigación de TRI utiliza la AI para mejorar la capacidad humana.
Este enfoque se conoce como Amplificación de Inteligencia (Intelligence Amplification). Las máquinas y los humanos trabajan sus sinergias para hacer mejor conjuntamente lo que ninguno de los dos podrían hacer individualmente.
‘Jidoka’, automatización con enfoque humano
«Los estudios de Ikigai nos enseñan que nos sentimos más satisfechos cuando hacemos un trabajo que amamos», explica Gill Pratt, CEO de TRI.
«Los estudios de Ikigai nos enseñan que nos sentimos más satisfechos cuando hacemos un trabajo que amamos»
«Para permitir que más personas alcancen su Ikigai, TRI busca nuevas formas de ‘automatización con un toque humano’ (‘Jidoka’)».
«Y a desarrollar capacidades que amplifiquen la capacidad humana, con el objetivo de alcanzar la felicidad y realización a todas las personas».

Robots de amplificación humana
A medida que la sociedad envejece, habrá una enorme demanda de mayores cuidados:
- sistemas que nos permitan vivir más tiempo independientes.
- ayudas para una fuerza laboral cada vez más envejecida.
Los robots y la automatización pueden desempeñar un papel clave en liberar a las personas para que pasen más tiempo con la familia. O para ayudar a las personas con las tareas que disfrutan.
Lo desarrolladores de robótica aún no han descubierto cómo hacer que los robots operen de manera fiable en entornos tan complejos y no estructurados.
«La investigación robótica de TRI se centra en el hogar porque es en ese entorno donde los robots pueden proporcionar la mayor ayuda»
A diferencia de las fábricas, donde el entorno es estructurado y programable, los entornos humanos naturales, como el hogar, son desestructurados, muy variables y diversos.
Por ejemplo, cada hogar es único, con una combinación diferente de objetos en configuraciones distintas que cambian constantemente.
Enseñar a los robots el comportamiento humano
«El hogar es donde los robots proporcionan mayor ayuda para el desarrollo humano», señala Max Bajracharya, Vicepresidente de Robótica de TRI.
«El hogar es donde los robots proporcionan mayor ayuda para el desarrollo humano»,
«También es uno de los entornos más complejos para que los robots los puedan dominar».
«Nuestro trabajo se centra en dos desafíos clave:
- enseñar a los robots el comportamiento humano
- usar la simulación para entrenar y validar los comportamientos de los robots».
«Denominamos esta idea como el aprendizaje de la flota, donde cuando una máquina aprende algo, todos aprenden algo. Creemos que esta va a ser la clave para hacer que los robots en entornos humanos resulten prácticos».


Enseñar a los robots
TRI enseña al robot a realizar tareas arbitrarias con una gran variedad de objetos, en lugar de programar el robot para realizar tareas predefinidas.
Utilizar a los seres humanos como profesores es clave para que los robots aprendan y adquieran habilidades en el mundo real
De esta manera, el robot aprende a vincular lo que ve con las acciones que se le enseñan. Cuando el robot vuelve a ver un objeto o escenario específico, sabe qué acciones puede tomar con respecto a lo que ve.
Utilizar a los seres humanos como profesores es una forma clave que permite a los robots aprender y adquirir habilidades en el mundo real.
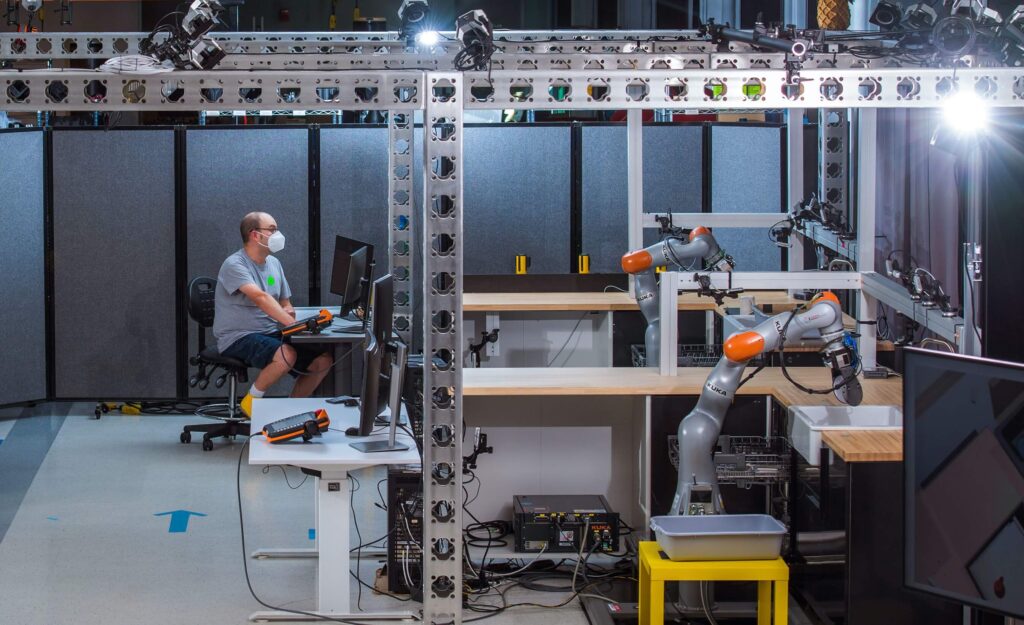
Usando la realidad virtual, un entrenador humano ve lo que el robot ve en tiempo real. Y luego ordena al robot que realice una variedad de acciones diferentes.
El equipo de robótica de TRI trabaja en generalizar este tipo de aprendizaje. Si un robot aprende una tarea de limpieza en una cocina simulada, podría hacer la misma tarea en cualquier otra cocina.

Simulación para la investigación de comportamientos
TRI ha realizado una inversión significativa en simulación, tanto para la ingeniería como para la validación de comportamientos de robots.
La mecánica de la manera en que una mano robotizada interactúa con los objetos es muy complicada de simular. Por eso, la simulación no se ha utilizado para la investigación de gestos manuales en robótica.
El software de simulación permite entender el rendimiento del robot sin tener que realizar las tareas cada vez que se realiza un cambio.
Simulación en cocinas reales
Los resultados en la simulación se prueban en entornos de cocinas reales en el laboratorio TRI en Cambridge.
El uso de herramientas de simulación permite avanzar en el desarrollo robótico aunque sólo haya un período de acceso limitado a materiales de pruebas.
Los resultados en la simulación se prueban en entornos de cocinas reales en el laboratorio TRI en Cambridge
«Hemos utilizado nuestro robot de carga de platos y limpieza de entornos desordenados para mejorar de manera automatizada los comportamientos durante la simulación y que eso resulte en un mejor rendimiento en los robots reales», asegura Russ Tedrake, Vicepresidente de Investigación Robótica de TRI.
El equipo de manipulación robótica TRI con sede en Cambridge, Massachusetts (EEUU), está trabajando en ampliar la investigación sobre esos desafíos.


Robot linear
Respecto a soluciones robóticas en el hogar, el equipo de TRI también está considerando ideas algo más radicales.
Al desplazarse por el techo, el robot evita los problemas de tener que moverse por el posible desorden del suelo del hogar
Un concepto innovador es el ‘Robot linear’. Es capaz de descender desde un marco de techo para realizar tareas como cargar el lavavajillas, limpiar superficies y colocar objetos desordenados.
Al desplazarse por el techo, el robot evita los problemas de tener que moverse por el posible desorden del suelo del hogar.
Cuando no está en uso, el robot se recoge sin suponer un estorbo o molestia.
El prototipo de robot de laboratorio puede hacer las mismas tareas que un robot móvil de suelo, con el innovador sistema de movilidad aérea.


También han desarrollado unas nuevas pinzas de materiales blandos que tienen una capacidad de detección táctil de alta sensibilidad.
«Las pinzas blandas están hechas de un material suave con burbujas de aire», explica Tedrake. «Dentro hay una cámara de profundidad que detecta la forma que percibe la burbuja, y rastrea el movimiento para estimar la fuerza de presión».


‘Mock Home’, casa simulada
En la sede de TRI en Los Altos, California (EEUU), un equipo de investigación dirigido por Jeremy Ma y Dan Helmick trabajan en una nueva instalación de pruebas de robótica denominada ‘Mock Home» (casa simulada).
«Esperamos que este laboratorio sea un elemento fundamental para desarrollar las capacidades futuras de la robótica en Toyota»
Se pueden usar diferentes diseños de pisos y cambiar la posición y ubicación de sus muebles y objetos. Esto permite a TRI desarrollar capacidades fundamentales de un robot antes de probarlas en un hogar real.
La casa simulada cuenta con cocina, comedor, baño, y un espacio de estar similar a los que se pueden encontrar en una casa real.
«El hogar simulado ofrece la posibilidad de probar conceptos de manera rápida y eficiente», afirma Jeremy Ma, Senior Manager de Robótica.
«Esperamos que este laboratorio sea un elemento fundamental para desarrollar las capacidades futuras de la robótica en Toyota».


Atender las necesidades reales de las personas
Para que la robótica tenga éxito en el hogar, TRI considera fundamental descubrir los gustos, necesidades y formas de realización individuales de los seres humanos.
TRI tiene un grupo de experiencia de usuarios para robótica y diseño industrial para descubrir e identificar las necesidades reales de los usuarios
Adopta un enfoque de ‘fallo rápido’ para el desarrollo de la tecnología para que su trabajo pueda tener un impacto positivo en las vidas reales.
TRI tiene un grupo de experiencia de usuarios para robótica y diseño industrial para descubrir e identificar las necesidades reales de los usuarios.
Investigación basada en la observación


«Dependemos en gran medida de las técnicas de investigación basadas en la observación», asegura Steffi Paepcke, Jefe de Equipo en Experiencia de Usuario de TRI.
«Antes del COVID-19, nos desplazamos a Japón a trabajar con nuestros colegas de investigación para visitar hogares de personas de avanzada edad. Les observamos realizando su vida diaria, tomando nota de los puntos clave, desafíos y oportunidades».
«Observamos que cocinar es una actividad muy agradable para muchas personas, aunque puede ser más exigente y cansada a medida que pasa el tiempo».
«Compartir la comida y cocinar para sus seres queridos también sirve como nexo de unión para la conexión social…»
«Ofrecer a las personas mayores un robot de cocina totalmente automatizado podría ser físicamente beneficioso, pero emocionalmente perjudicial», señala Paepcke.
El desafío es entender realmente cómo desarrollar la robótica centrada en el ser humano cuando cada usuario individual representa un caso y un modelo único.
El verdadero objetivo de la robótica de TRI es desarrollar nuevas capacidades que puedan contribuir a resolver problemas del mundo real. Y ayudar a la sociedad de una manera mucho más global.